Air cylinders and pneumatic solenoid valves are also used in lots of useful fields.
The anti-collision beam is an important part of the vehicle (heavy 5kg), which can absorb the impact energy generated by the collision to ensure the safety of personnel. The anti-collision beam comprises an energy-absorbing box and an anti-collision beam body (shown in figure 1). In the anti-collision beam’s manufacturing process, after completing the bonding process and hot pressing process, the pneumatic manipulator should clamp the anti-collision beam from the horizontal position and then flip 90 °and fixes it, so that the robot can complete the drilling and riveting process for it.
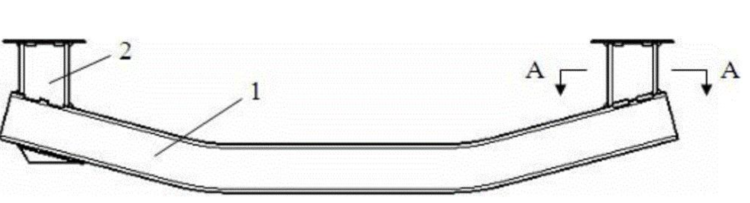
(1. anti-collision beam body 2. energy-absorbing box)
The below figure shows the overall structure of the anti-collision beam grasping and flipping manipulator. Its end effector is a pneumatic claw (air claw for short).

(1.Z-axis motion component 2.X-axis motion component 3. Telescopic cylinder 4. air claw 5. Lifting cylinder)
Two linear movement components make the claw enter the working area of human grasping and return to the initial position after the operation at the same time. And it has the degree of freedom to move along the X-axis and Z-axis and rotate around the B axis. X-axis and Z-axis are driven by ball screw, and B-axis rotation is driven by motor and planetary reducer.
The movement and rotation of each shaft are driven by a stepper motor with a self-locking function. The clamping action is completed by pneumatic (the movement of the cylinder and the release and self-locking of the claws). Two touch switches are arranged at the flip joint to detect the flip initial angle and the flip end angle. A touch switch is arranged under the air claw to detect whether the air claw is lowered to the position where the anti-collision beam can be grasped. The x-axis and 2-axis check the rigid ends’ limit position and whether they move to the grasping working position of the pneumatic claw by setting a photoelectric switch.
The grasping action of the manipulator is completed by the pneumatic system, as shown in the following figure.

(1:Air compressor 2:Pneumatic FRL 3:Valve plate 4/7: 3/5 way pneumatic solenoid valve 5/6:Air claw 8/9. Air cylinder)
The actuators are two air claws 5 and 6 (model MHZ2-40D with release stroke of 30 ~ 60mm) and two cylinders 8 and 9 (model MGPM40-75, effective stroke 75mm). The function of the air claw is to clamp or release the anti-collision beam, the clamping part is the two energy absorption boxes of the anti-collision beam, and the positions of the two air claws are respectively set under the left and right air rainbow. it can be protruded or woven back with the cylinder: the main function of the air surface is to drive the air claw to move to the specified position so that the air claw can clamp or release the anti-collision beam. The cylinder is arranged on the left and right sides of the flip assembly. The motion states of the two air claws and the two cylinders are controlled by three-position five-way electromagnetic reversing valves 4 and 7, respectively; the middle positions of the solenoid valves 4 and 7 are O-type functions, which can lock the air claws and cylinders to maintain the current state position of the cylinders and claws. The air compressor 1 is divided into two ways to supply compressed air to the claw and cylinder through the pneumatic triad 2 and the valve plate 3. The air supply pressure of the air compressor is 1 MPA.
From the operation state of the system, it is easy to understand the electromagnet turn-on and break of the reversing valve and the airflow route of the system under various working conditions.
The system has the following technical features:
- The three-degree-of-freedom manipulator can grasp, flip and fix the anti-collision beam with the robot. The clamping is realized by the pneumatic claw at the driving end of the pneumatic system, and the stepper motor controls the movement of each axis and flips with a self-locking function. The working reliability is high, and it can meet the requirements of the robot for the anti-collision beam drilling and riveting process.
- The number of components of the pneumatic system is small, and the structure of the air path is simple.

