Pneumatic products have many practical and interesting applications in many fields. In this article, we will explain how pneumatic system used in stringed instrument automatic playing robot. Air cylinder and pneumatic solenoid valve, also pneumatic fittings will be used in this system.
The musical instrument-playing robot controls the mechanical structure through the electronic control device to simulate humans playing musical instruments. The core of the stringed instrument automatic playing robot band is the automatic playing mechanism, which can edit the music score on the computer, transmit the music score, and playing commands to the performance system controller through the communication port, and the performance system analyzes the received music score, then decompose and act to complete the automatic performance of the score.
The composition block diagram of the automatic stringed instrument playing robot is shown below figure.
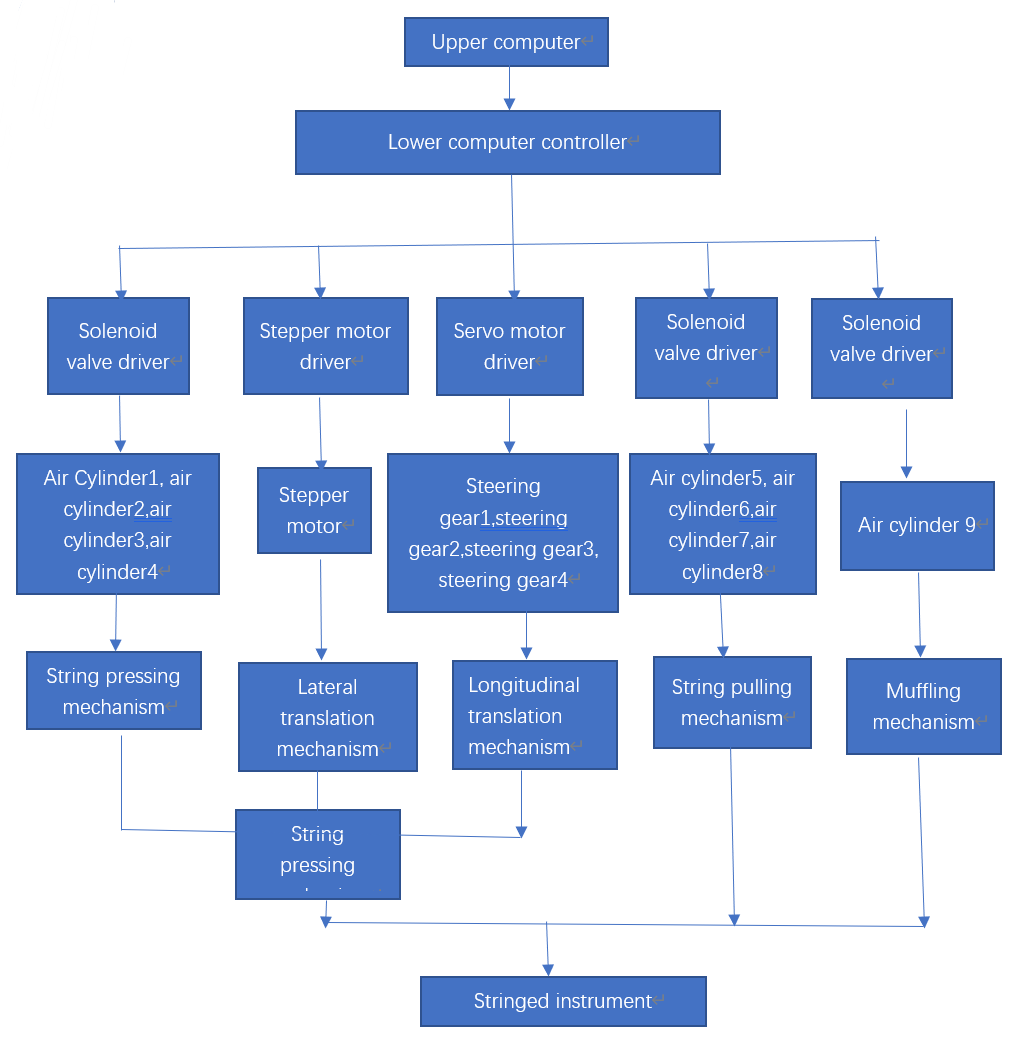
According to the principle of bionics, its executive mechanism includes a string pressing mechanism, plucking string mechanism and muffling mechanism, and so on. Among them, the string plucking mechanism and the string pressing mechanism are driven by a cylinder controlled by a two-position three-way solenoid valve, and the lateral translation mechanism of the pressing mechanism is driven by a stepper motor and a linear slide rail along the direction of the piano body. The string pressing mechanism’s longitudinal translation mechanism along the piano body’s vertical direction is driven by a micro servo motor (steering gear) and a linear slide rail. The muffler mechanism is also driven by a cylinder. The lower machine controller at the bottom uses a high-speed single-chip microcomputer (STM32F103R 8T6) to control the solenoid valve, steering gear, stepper motor, and other actuators, and to decode the note commands sent by the upper computer.
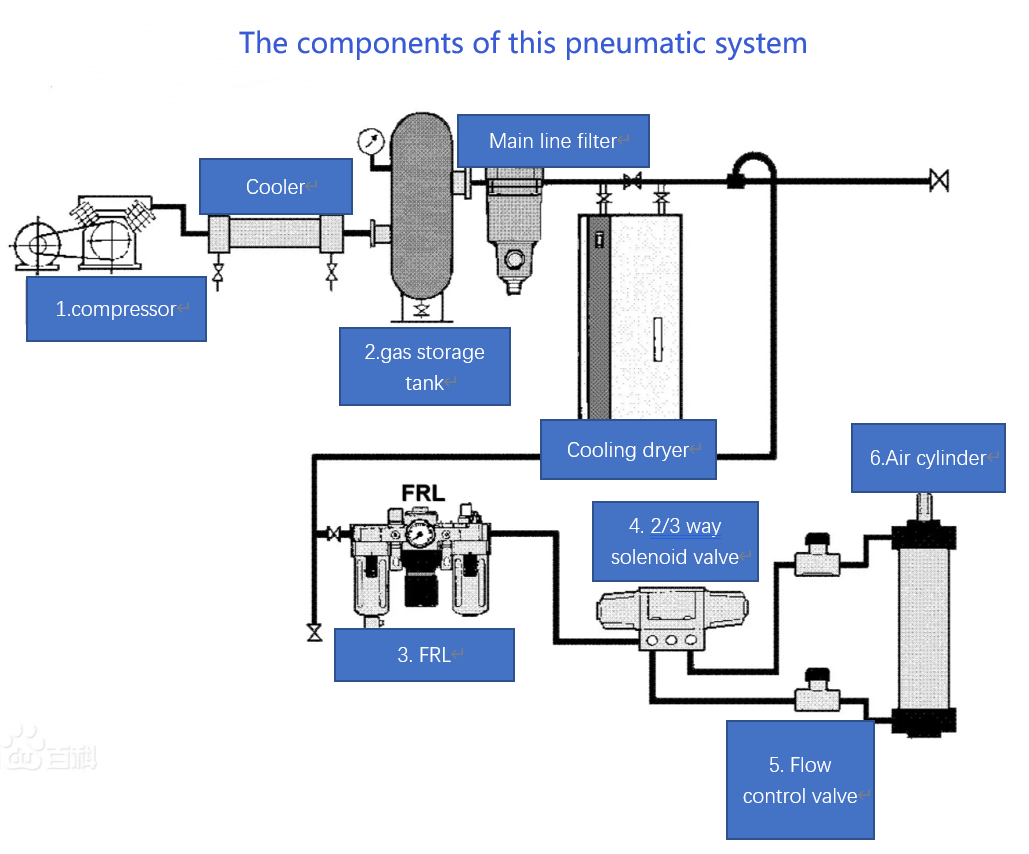
As shown in the figure, the playing robot’s pneumatic actuator consists of nine air cylinders, and a common pneumatic system is used to support its normal operation. And air compressor(1) and storage tank(2) provide air source, FRL(3) is used for filtering pressure regulation and lubricating oil atomization, and the filtration accuracy is less than 40um. the movement direction of the air cylinder (AIRTAC type SU model) is controlled by a solenoid valve(4)(3V210-08-NC), and its speed is controlled by a flow control valve (5)
The control system hardware of the stringed instrument automatic performance system includes main control appliance, power management circuit, limit switch, communication circuit ‘solenoid valve drive circuit, stepper drive circuit’ micro servo motor (steering gear) drive status indication circuit. The control system software consists of two parts: the upper computer and the lower computer. There are 19 programs, which are divided into 5 categories according to different functions: 1.1 main programs, 2.7 underlying hardware control programs, 3.5 basic action programs (complete muting, hitting, plucking, string pressing, and lateral displacement functions respectively), 4.4 sound programs and 5.2 data processing subroutines.
The strung instrument automatic playing robot’s pressing mechanism, the plucking mechanism, and the muffling mechanism are driven by a cylinder, and the translation mechanism driven by stepper and servo motor is controlled by a single-chip microcomputer, which realizes the automation and intelligence of the music playing robot.

